Creating a Quadruped Character Controller in Unity (with Malber's Animal Controller)
For Pocket Moon's new in-development title, The Attestation of Sköll, I've been working on the gameplay-technical side of things, starting with interactions, dialogue, the camera system, and primarily the character controller.
The titular character Sköll, the wolf of Norse mythos, is a quadruped which has meant that I can't use my go-to imitation-Source-Engine controller, which is designed not only for first-person games but for bipedal characters; the important difference between quadrupeds and bipeds when it comes to controllers is that a quadruped is not rotationally invariant along its vertical axis: a typical controller with a vertical capsule for collision checking can be rotated safely along the Y-axis without really changing the space the collider occupies, but if you were to turn that collider on its side, suddenly a simple yaw rotation can put the collision volume inside of another object.
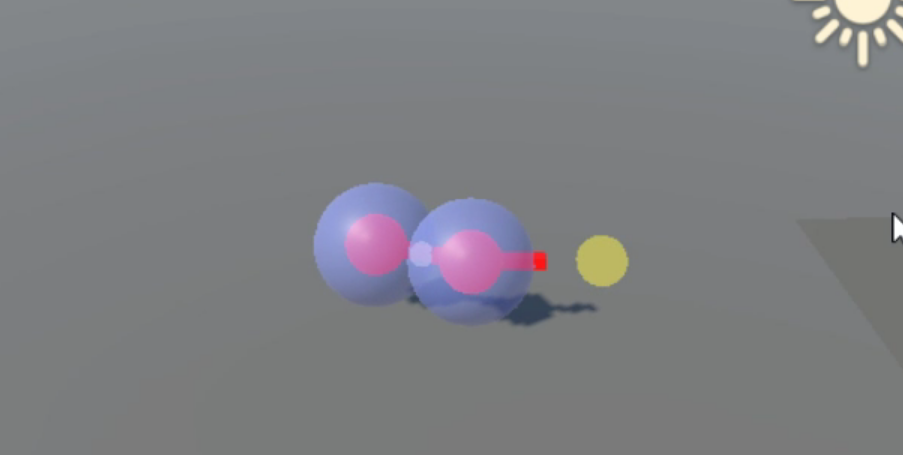
To solve quadruped collision and control, I started with a prototype that used two spheres to represent the front and rear of the animal. The front would attempt to move and orient toward the target direction, while the rear segment followed and tried to orient toward the front. This somewhat solved the problem of rotating in a confined space, by allowing the segments to solve themselves into a free space, but this presented the issue of the two segments potentially ending up overlapping too much, which would look broken if used to inform the character model.
After a lot of trial and error with this method, I decided on using a tool specifically for animal character controllers, developed by Malbers. Although there's a lot of tinkering and even modifying the tool's own code, it handles most of the complicated things like collision and ground alignment, and meant I could start working with root-motion animations for our character.
Root motion refers to using a rig's root bone to move the entire character, by translating the bone's per-frame translation into a translation on the entire object. This method of locomotion is difficult to control more precisely from a gameplay perspective (movement techniques, physics-driven/rigidbody-like motion) but results in far smoother, artistically-tuned movement with minimal, if any, foot-sliding.
To select animations and controller behaviours, the Animal Controller plugin uses a state machine to represent whether the character is idle, locomoting, jumping, etc. The transitions between these states can be dependent on inputs or on other conditional checks such as for the fall and ledge-climb states.
With states for idle and locomotion set up as per the plugins easy to follow guide, the bulk of the work to get the character moving was with animations for standing and walking. Walking animations can have separate speeds that can be blended between or selected outright, as well as turning animations that match the step phasing and general motion of each other, allowing a blend tree to govern how the character makes turns while walking.
Basic Locomotion

Jumping & Climbing

To activate the ledge climb state, the plugin has options for performing it automatically or when a particular key is pressed, although I had to add some modifications to get the particular behaviour I was after: I wanted shallow ledge climbs to be performed automatically, but only when the movement keys are actively being held to prevent latent motion from another ledge climb from activating itself again when another ledge is present.
Although I've yet to add other walk speeds and stances, the result is workable for now until we get the rest of the game fleshed out.

Comments
Post a Comment